Over the past year, I’ve been building a model that lets me look at how opinions evolve in belief space, much in the manner that flocks, herds and schools emerge in the wild.
Recently, I was Listening to BBC Business Daily this morning on Facebook vs Democracy:
- Presenter Ed Butler hears a range of voices raising concern about the existential threat that social media could pose to democracy, including Ukrainian government official Dmytro Shymkiv, journalist Berit Anderson, tech investor Roger McNamee and internet pioneer Larry Smarr.
Roger McNamee and Larry Smarr in particular note how social media can be used to increase polarization based on emergent poles. In other words, “normal” opposing views can be amplified by attentive bad actors [page 24] with an eye towards causing generalized societal disruption.
My model explores emergent group interactions and I wondered if this adversarial herding in information space as it might work in my model.
These are the rough rules I started with:
- Herders can teleport, since they are not emotionally invested in their belief space position and orientation
- Herders appear like multiple individuals that may seem close and trustworthy, but they are actually a distant monolithic entity that is aware of a much larger belief space.
- Herders amplify arbitrary pre-existing positions. The insight is that they are not herding in a direction, but to increase polarization
- To add this to the model, I needed to do the following:
- Make the size of the agent a function of the weight so we can see what’s going on
- When in ‘herding mode’ the overall heading of the population is calculated, and the agent that is closest to that heading is selected to be amplified by our trolls/bot army.
- The weight is increased to X, and the radius is increased to Y.
- X represents AMPLIFICATION BY trolls, bots, etc.
- A large Y means that the bots can swamp other, normally closer signals. This models the effect of a monolithic entity controlling thousands of bots across the belief space
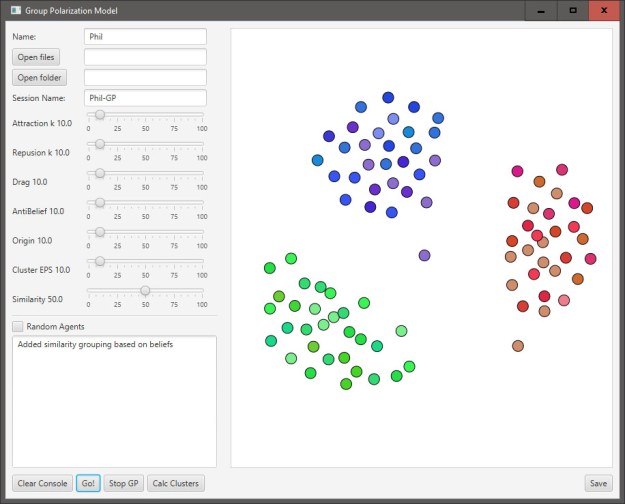
Here’s a screenshot of the running simulation. There is an additional set of controls at the upper left that allow herding to be enables, and the weight of the influence to be set. In this case, the herding weight is 10. Though the screenshot shows one large agent shape, the amplified shape flits from agent to agent, always keeping closest to the average heading.

The results are kind of scary. If I set the weight of the herder to 15, I can change the change the flocking behavior of the default to echo chamber.
- Normal:

- Herding weight set to 15, other options the same:

I did some additional tweaking to see if having highly-weighted herders ignore each other (they would be coordinated through C&C) would have any effect. It doesn’t. There is enough interaction through the regular populations to keep the alignment space reduced.
It looks like there is a ‘sick echo chamber’ pattern. If the borders are reflective, and the herding weight + influence radius is great enough, then a wall-hugging pattern will emerge.
The influence weight is sort of a credibility score. An agent that has a lot of followers, or says a lot of the things that I agree with has a lot of influence weight The range weight is reach.
Since a troll farm or botnet can be regarded as a single organization, interacting with any one of the agents is really interacting with the root entity. So a herding agent has high influence and high reach. The high reach explains the border hugging behavior.
It’s like there’s someone at the back of the stampede yelling YOUR’E GOING THE RIGHT WAY! KEEP AT IT! And they never go off the cliff because they are a swarm Or, it never goes of the cliff, because it manifests as a swarm.
A loud, distributed voice pointing in a bad direction means wall hugging. Note that there is some kind of floating point error that lets wall huggers creep off the edge.
With a respawn border, we get the situation where the overall heading of the flock doesn’t change even as it gets destroyed as it goes over the border. Again, since the herding algorithm is looking at the overall population, it never crosses the border but influences all the respawned agents to head towards the same edge: 
Who’d have thought that there could be something worse than runaway polarization?